EMF posteriore di u mutore sincronu à magneti permanenti
1. Cumu hè generatu u back EMF?
A generazione di forza elettromotrice inversa hè faciule da capisce. U principiu hè chì u cunduttore taglia e linee di forza magnetiche. Finchè ci hè un muvimentu relativu trà i dui, u campu magneticu pò esse stazionariu è u cunduttore u taglia, o u cunduttore pò esse stazionariu è u campu magneticu si move.
Per i motori sincroni à magneti permanenti, e so bobine sò fissate nantu à u statore (conduttore) è i magneti permanenti sò fissati nantu à u rotore (campu magneticu). Quandu u rotore gira, u campu magneticu generatu da i magneti permanenti nantu à u rotore gira, è serà tagliatu da e bobine nantu à u statore, generendu forza elettromotrice inversa in e bobine. Perchè si chjama forza elettromotrice inversa? Cum'è u nome suggerisce, a direzzione di a forza elettromotrice inversa E hè opposta à a direzzione di a tensione terminale U (cum'è mostratu in a Figura 1).
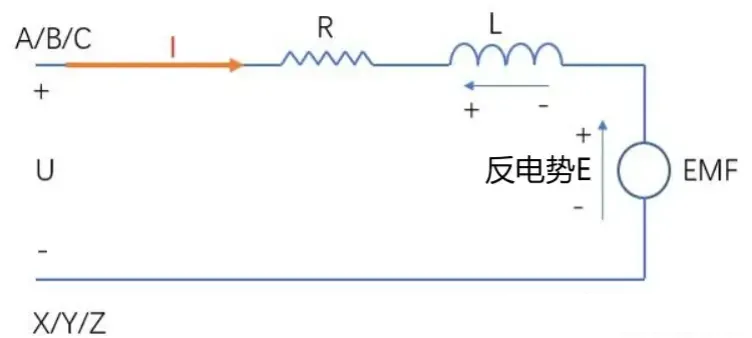
Figura 1
2. Chì ghjè a relazione trà a forza elettromotrice inversa è a tensione di i terminali ?
Si pò vede da a Figura 1 chì a relazione trà a forza elettromotrice inversa è a tensione terminale sottu carica hè:
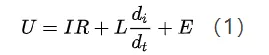
A prova di forza elettromotrice inversa hè generalmente realizata in cundizioni senza carica, senza corrente è à una velocità di 1000 giri/min. In generale, u valore di 1000 giri/min hè definitu cum'è coefficientu di forza elettromotrice inversa = valore mediu di forza elettromotrice inversa / velocità. U coefficientu di forza elettromotrice inversa hè un parametru impurtante di u mutore. Ci vole à nutà quì chì a forza elettromotrice inversa sottu carica cambia constantemente prima chì a velocità sia stabile. Da a formula (1), pudemu sapè chì a forza elettromotrice inversa sottu carica hè più chjuca di a tensione di u terminale. Se a forza elettromotrice inversa hè più grande di a tensione di u terminale, diventa un generatore è emette tensione à l'esternu. Siccomu a resistenza è a corrente in u travagliu attuale sò chjuche, u valore di a forza elettromotrice inversa hè apprussimatamente uguale à a tensione di u terminale è hè limitatu da u valore nominale di a tensione di u terminale.
3. U significatu fisicu di a forza elettromotrice inversa
Imagine ciò chì accaderebbe se a forza elettromotrice posteriore ùn esistessi micca ? Da l'equazione (1), pudemu vede chì senza a forza elettromotrice posteriore, tuttu u mutore hè equivalente à una resistenza pura, diventendu un dispositivu chì genera assai calore, ciò chì hè cuntrariu à a cunversione di l'energia elettrica in energia meccanica da parte di u mutore. In l'equazione di cunversione di l'energia elettrica UIt hè l'energia elettrica d'entrata, cum'è l'energia elettrica d'entrata à una batteria, un mutore o un trasformatore; I2Rt hè l'energia di perdita di calore in ogni circuitu, chì hè un tipu d'energia di perdita di calore, più chjuca hè megliu; a differenza trà l'energia elettrica d'entrata è l'energia elettrica di perdita di calore, hè l'energia utile currispondente à a forza elettromotrice posteriore.
UIt hè l'energia elettrica d'entrata, cum'è l'energia elettrica d'entrata à una batteria, un mutore o un trasformatore; I2Rt hè l'energia di perdita di calore in ogni circuitu, chì hè un tipu d'energia di perdita di calore, più chjuca hè megliu; a differenza trà l'energia elettrica d'entrata è l'energia elettrica di perdita di calore, hè l'energia utile currispondente à a forza elettromotrice posteriore. In altre parolle, a forza elettromotrice inversa hè aduprata per generà energia utile è hè inversamente ligata à a perdita di calore. Più grande hè l'energia di perdita di calore, più chjuca hè l'energia utile ottenibile. Obiettivamente, a forza elettromotrice inversa cunsuma energia elettrica in u circuitu, ma ùn hè micca una "perdita". A parte di l'energia elettrica currispondente à a forza elettromotrice inversa serà cunvertita in energia utile per l'apparecchiature elettriche, cum'è l'energia meccanica di i motori, l'energia chimica di e batterie, ecc.
In altre parolle, a forza elettromotrice inversa hè aduprata per generà energia utile è hè inversamente ligata à a perdita di calore. Più grande hè l'energia di perdita di calore, più chjuca hè l'energia utile ottenibile. Obiettivamente, a forza elettromotrice inversa cunsuma energia elettrica in u circuitu, ma ùn hè micca una "perdita". A parte di l'energia elettrica currispondente à a forza elettromotrice inversa serà cunvertita in energia utile per l'apparecchiature elettriche, cum'è l'energia meccanica di i motori, l'energia chimica di e batterie, ecc.
Si pò vede da questu chì a dimensione di a forza elettromotrice posteriore significa a capacità di l'equipaggiu elettricu di cunvertisce l'energia tutale d'ingressu in energia utile, chì riflette u livellu di a capacità di cunversione di l'equipaggiu elettricu.
4. Da chì dipende a magnitudine di a forza elettromotrice inversa?
A formula di calculu di a forza elettromotrice inversa hè: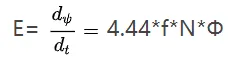
E hè a forza elettromotrice di a bobina, ψ hè u flussu magneticu, f hè a frequenza, N hè u numeru di spire, è Φ hè u flussu magneticu.
Basatu annantu à a formula sopra, credu chì ognunu pò probabilmente dì uni pochi di fattori chì influenzanu a magnitudine di a forza elettromotrice inversa. Eccu un articulu per riassume:
(1) A forza elettromotrice inversa hè uguale à a velocità di cambiamentu di u flussu magneticu. Più alta hè a velocità, più grande hè a velocità di cambiamentu è più grande hè a forza elettromotrice inversa.
(2) U flussu magneticu stessu hè uguale à u numeru di giri multiplicatu per u flussu magneticu di un solu giru. Dunque, più altu hè u numeru di giri, più grande hè u flussu magneticu è più grande hè a forza elettromotrice inversa.
(3) U numeru di giri hè ligatu à u schema di avvolgimentu, cum'è a cunnessione stella-triangolo, u numeru di giri per fessura, u numeru di fasi, u numeru di denti, u numeru di rami paralleli, è u schema à passu cumpletu o à passu cortu.
(4) U flussu magneticu à una sola volta hè uguale à a forza magnetomotrice divisa per a resistenza magnetica. Dunque, più grande hè a forza magnetomotrice, più chjuca hè a resistenza magnetica in a direzzione di u flussu magneticu è più grande hè a forza elettromotrice inversa.
(5) A resistenza magnetica hè ligata à u spaziu d'aria è à a coordinazione polu-fessure. Più grande hè u spaziu d'aria, più grande hè a resistenza magnetica è più chjuca hè a forza elettromotrice inversa. A coordinazione polu-fessure hè più cumplicata è richiede un'analisi specifica.
(6) A forza magnetomotrice hè ligata à u magnetismu residuale di u magnetu è à l'area efficace di u magnetu. Più grande hè u magnetismu residuale, più alta hè a forza elettromotrice inversa. L'area efficace hè ligata à a direzzione di magnetizazione, a dimensione è u piazzamentu di u magnetu è richiede un'analisi specifica.
(7) U magnetismu residuale hè ligatu à a temperatura. Più alta hè a temperatura, più chjuca hè a forza elettromotrice inversa.
In riassuntu, i fattori chì influenzanu a forza elettromotrice inversa includenu a velocità di rotazione, u numeru di giri per slot, u numeru di fasi, u numeru di rami paralleli, u passu cumpletu è u passu cortu, u circuitu magneticu di u mutore, a lunghezza di u spaziu d'aria, a currispundenza polu-slot, u magnetismu residuale di l'acciaiu magneticu, u piazzamentu è a dimensione di l'acciaiu magneticu, a direzzione di magnetizazione di l'acciaiu magneticu è a temperatura.
5. Cumu selezziunà a dimensione di a forza elettromotrice posteriore in u cuncepimentu di u mutore?
In a cuncepzione di i motori, a forza elettromotrice inversa E hè assai impurtante. Sè a forza elettromotrice inversa hè ben cuncipita (dimensione adatta, bassa distorsione di a forma d'onda), u motore hè bonu. A forza elettromotrice inversa hà parechji effetti maiò nantu à u motore:
1. A magnitudine di a forza elettromotrice posteriore determina u puntu magneticu debule di u mutore, è u puntu magneticu debule determina a distribuzione di a mappa di efficienza di u mutore.
2. A velocità di distorsione di a forma d'onda EMF inversa affetta a coppia di ripple di u mutore è a fluidità di a coppia in uscita quandu u mutore hè in funzione.
3. A magnitudine di a forza elettromotrice posteriore determina direttamente u coefficientu di coppia di u mutore, è u coefficientu di forza elettromotrice posteriore hè proporzionale à u coefficientu di coppia.
Da questu, si ponu ottene e seguenti cuntradizioni in u disignu di u mutore:
a. Quandu a forza elettromotrice posteriore hè grande, u mutore pò mantene una coppia elevata à a corrente limite di u controller in a zona di funziunamentu à bassa velocità, ma ùn pò micca pruduce coppia à alta velocità, è ancu ùn pò micca ghjunghje à a velocità prevista;
b. Quandu a forza elettromotrice posteriore hè chjuca, u mutore hà sempre una capacità di uscita in a zona di alta velocità, ma a coppia ùn pò esse ottenuta à a listessa corrente di u controller à bassa velocità.
6. L'impattu pusitivu di a contraelectromotoria nantu à i motori à magneti permanenti.
L'esistenza di a forza elettromotrice inversa hè assai impurtante per u funziunamentu di i motori à magneti permanenti. Pò purtà alcuni vantaghji è funzioni speciali à i motori:
a. Risparmiu energeticu
A forza elettromotrice posteriore generata da i motori à magneti permanenti pò riduce a corrente di u mutore, riducendu cusì a perdita di putenza, riducendu a perdita di energia è ottenendu u scopu di u risparmiu energeticu.
b. Aumentà a coppia
A forza elettromotrice inversa hè opposta à a tensione di alimentazione. Quandu a velocità di u mutore aumenta, a forza elettromotrice inversa aumenta ancu. A tensione inversa riducerà l'induttanza di l'avvolgimentu di u mutore, risultendu in un aumentu di corrente. Questu permette à u mutore di generà una coppia supplementaria è di migliurà e prestazioni di putenza di u mutore.
c. Decelerazione inversa
Dopu chì u mutore à magneti permanenti perde a putenza, per via di l'esistenza di a contraemissione elettromotrice (EMF), pò cuntinuà à generà un flussu magneticu è fà chì u rotore cuntinui à girà, ciò chì forma l'effettu di a velocità inversa di a contraemissione elettromotrice, chì hè assai utile in certe applicazioni, cum'è e macchine utensili è altri equipaghji.
In breve, a contraelectromotoria hè un elementu indispensabile di i motori à magneti permanenti. Porta parechji vantaghji à i motori à magneti permanenti è ghjoca un rolu assai impurtante in a cuncepzione è a fabricazione di i motori. A dimensione è a forma d'onda di a contraelectromotoria dipendenu da fattori cum'è a cuncepzione, u prucessu di fabricazione è e cundizioni d'usu di u mutore à magneti permanenti. A dimensione è a forma d'onda di a contraelectromotoria anu una influenza impurtante nantu à e prestazioni è a stabilità di u mutore.
Anhui Mingteng Permanent Magnet Electromechanical Equipment Co., Ltd. (https://www.mingtengmotor.com/)hè un fabricatore prufessiunale di motori sincroni à magneti permanenti. U nostru centru tecnicu hà più di 40 persone in R&S, divise in trè dipartimenti: cuncepimentu, prucessu è test, specializate in a ricerca è u sviluppu, a cuncepimentu è l'innuvazione di prucessu di motori sincroni à magneti permanenti. Utilizendu un software di cuncepimentu prufessiunale è prugrammi speciali di cuncepimentu di motori à magneti permanenti autosviluppati, durante u prucessu di cuncepimentu è di fabricazione di u mutore, a dimensione è a forma d'onda di a forza elettromotrice posteriore saranu attentamente cunsiderate secondu i bisogni effettivi è e cundizioni di travagliu specifiche di l'utente per assicurà e prestazioni è a stabilità di u mutore è migliurà l'efficienza energetica di u mutore.
Copyright: Questu articulu hè una ristampa di u numeru publicu WeChat "电机技术及应用", u ligame originale https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
Questu articulu ùn rapprisenta micca i punti di vista di a nostra sucietà. Sè vo avete opinioni o punti di vista diffirenti, per piacè curreggeci!
Data di publicazione: 20 d'aostu 2024